
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

... 認証 - UL Listed CE UKCA EAC (ユーラシア) TÜV 技術データ 電気データ 位相範囲の目的 - 主電源 供給電圧 (V) - 208 - 480 V 位相の電源電圧範囲 - 3×208~3×480 V 電源電圧範囲の電圧タイプ - AC 電源電圧U1のタイプ - AC U2の目的 - 電源 供給電圧2 (V) - 24 V 電源電圧U2のタイプ - DC ブレーキ付きU2の許容電圧範囲 ...

... 最大4台のiPOS360x VX-CANドライブコントローラを搭載したモーションシステム DCブラシレス、DCブラシ付き、ステッピング、リニア、ボイスコイルモーターに対応 電源電圧:9~36 VDC、ロジック電圧:7~36 VDC ドライブあたり最大4 A(連続)、10 A(ピーク) 軸間のCAN通信 セットアップ用RS-232およびイーサネット 外形寸法(L×W×H):98×100.3×21.2 mm 電気的特性/軸あたり: モーター電源/ロジック電源:9~36 VDC 出力電流(iPOS3602/iPOS3604):2/4 ...
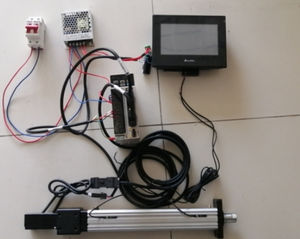
... 電気シリンダーコントローラのPLC制御画面は、深センUNI科技有限公司によって作られています。 多くのお客様は電動アクチュエータを往復運動のみに使用しています。しかし、その中には、どのように動作させるかについてほとんど知らない人もいる。プログラムの設定も知らない。また、サーボドライブの制御方法を覚えるのに時間をかけたくないという方もいらっしゃいます。この問題を解決するために、私たちは制御システムを提供することができます。 電動アクチュエータは、往復運動のみでご使用されるお客様も多くいらっしゃいます。しかし、その中にはどのように動作させればいいのか、ほとんど知らない方もいらっしゃいます。プログラムを組むという発想がない。あるいは、サーボドライブの制御を学ぶのにあまり時間をかけたくないという方もいらっしゃいます。 この問題を解決するために、私たちは制御システムを提供することができます。アクチュエータ、サーボモータ、ドライブ、制御盤(PLC一体型)で構成されています。UNIのコントロールパネルはタッチスクリーンで、いくつかの機能ボタンがあります。さらに重要なのは、英語の操作インターフェイスに切り替えることができることです。PLCとタッチパネルは別々にプログラムをダウンロードします。そのため、お手元に届きましたら、すぐにお使いいただけます。お客様は必要なパラメータを入力するだけで、速度とストロークを自由に調整できます。さらに、プログラムと取扱説明書のコピーを必ずお送りします。そのため、お客様ご自身でプログラムを変更し、コントロールパネルにアップロードすることができます。きっと、電動シリンダーコントローラーは、あなたの指が触れるだけで、非常に簡単な方法であなたの仕事を簡素化します。 ...

... モーションコントロールシステムは、非常に精密な速度、位置、トルク制御が可能なシステムです。ライフサイエンスや診断用顕微鏡のように、サンプルの正確な位置決め、個別の装置要素の同期、高速なスタートとストップの動作が必要なアプリケーションは、すべてモーションコントロールの使用に最適な候補です。 これらの複雑なシステムの性能は、モーションコントロールシステムで使用されるメカニクス、モーションコントロールエレクトロニクス、およびソフトウェアに依存します。一般的に、モーションコントロールシステムは、モーションコントローラ、ドライブ、モーター、位置フィードバック用のデバイスで構成されています。 モーションコントローラは、自動化されたモーションコントロールシステムにおいて、動作経路、サーボループの閉鎖、およびシーケンスの実行を制御するプログラマブルデバイスである。基本的に、コントローラはモーションコントロールシステムの「頭脳」である。 モーションコントローラは、動作要件に基づいて、動作軌道を確立し、駆動回路に制御信号を送ってモーターを「駆動」し、閉ループシステムにおいて、エンコーダからの実際の位置フィードバック信号と指令軌道を比較し、必要に応じて制御ループを使用して修正動作を行い、理想的にはほとんど誤差がないようにします。 モーションコントロールシステムによっては、メインコントローラまたはドライブがレゾルバやエンコーダなどの位置フィードバック装置を利用して、高精度なモーションタスクを実現します。ドライブは、コントローラから低電力の信号またはコマンドを受信し、それらの信号をモータが動作するために必要な高電力の信号に変換します。 ...