
- Embalagem - Logística - Movimentação
- Movimentação e Elevação
- Garra de preensão pneumática
- Hangzhou FOUK Mechanical Technology Co., Ltd.
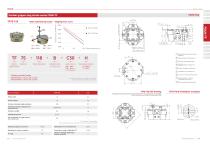
Garra de preensão de 4 dedos TF75-118pneumáticaparalelapara robô industrial

Guardar nos favoritos
Comparar
Características
- Acionamento
- pneumática
- Tipo
- paralela
- Número de dedos
- de 4 dedos
- Aplicações
- para robô industrial
- Opções
- 4 dedos, protegida
- Força de preensão
370 N, 386 N
- Curso
10 mm
(0,394 in)
Descrição
Opções de configuração:
B: Ventilação na parte inferior
C30: Comprimento do tirante
H: Resistência a altas temperaturas
A pinça pneumática de centragem de quatro dedos, com a estrutura de suporte de carga em forma de T, suporta diferentes placas de pressão. A sua mola de arrefecimento tem uma vida útil de mais de 500.000 vezes. A força de preensão da pinça de quatro dedos é uniforme, o que permite uma preensão estável dos objectos e evita danos.
---
Catálogos
Outros produtos Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Pesquisas relacionadas
- Garra de preensão pneumática
- Garra de preensão paralela
- Garra de preensão de 2 dedos
- Garra de preensão para robô industrial
- Garra de preensão de 3 dedos
- Garra de preensão angular
- Garra de preensão concêntrica
- Garra de preensão leve
- Garra de preensão grande curso
- Garra de preensão de 4 dedos
- Garra de preensão 2 dedos
- Garra de preensão 3 dedos
- Garra de preensão hidráulica
- Garra de preensão 4 dedos
- Módulo de preensão
- Garra de preensão à prova de água
- Garra de preensão flexível
- Garra de preensão industrial
- Módulo de preensão pneumático
- Módulo de preensão para robô colaborativo
* Os preços não incluem impostos, transporte, taxas alfandegárias, nem custos adicionais associados às opções de instalação e de ativação do serviço. Os preços são meramente indicativos e podem variar em função dos países, do custo das matérias-primas e das taxas de câmbio.