
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

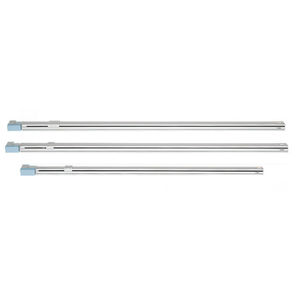
ストローク: 1,500, 3,000 mm
速度: 6.5, 10 m/s
推進力: 150, 500 N
... WHZ (SPEEDLINE) リニアリフティングユニット トムソンのWHZ(SPEEDLINE)Z軸ユニットは、垂直方向の動きに特化して設計されています。縦置きにすることで全体の負荷質量を減らし、設計トラベルを短くすることで、高いダイナミックな動きを得ることができます。 WHZの特徴 - 全方向に設置可能 - ベルトドライブ - 外部ホイールガイド - 調整可能なベルトテンション - シングルまたはデュアルキャリッジ WHZオプション - フリースライド式パワーブリッジ - ロングパワーブリッジ - ...

ストローク: 3,200 mm
速度: 2,000 mm/s
... モーター出力(W):100, 200 最大可搬質量(kg):40(横型) 位置決め繰り返し精度(mm):±0.04 ...
TM Robotics

ストローク: 100 mm - 2,550 mm
速度: 2,000 mm/s
... モーター出力(W):100, 200 最大可搬質量(kg):15~20(横型) 位置決め繰り返し精度(mm):±0.04 ...
TM Robotics

ストローク: 3,500 mm
速度: 2,000 m/s
... モーター出力(W):200、400 最大可搬質量(kg):40(横型) 位置決め繰り返し精度(mm):±0.04 ...
TM Robotics
ストローク: 150 mm - 3,050 mm
速度: 1,875 mm/s
... 長距離搬送に最適。単軸(1軸)ロボット(電動スライダ)タイミングベルト駆動モデルBタイプの特長をご紹介します。 特長 大きなモーメント負荷にも対応 4列サーキュラー溝式2点接触ガイド※1 差動すべりが少ない4列サーキュラーアーク溝式2点接触ガイドを採用。2列ゴシックアーチ溝式4点接触ガイドに比べて、構造上ボールの差動滑りが少なく、大きなモーメント負荷がかかったり、取付面精度が悪い場合でも良好な転がり運動が維持され、異常摩耗などの故障になりにくい性質を持ちます。 位置検出器には耐環境性に優れたレゾルバ採用 モータの位置検出にはレゾルバを採用しています。光学式エンコーダのように電子部品の故障などによる検出不良はなく耐久性に大変優れています。 また、アブソリュート仕様、インクリメンタル仕様ともにロボットの仕様は全く同じでコントローラも共通です。そのため、パラメータ設定だけでアブソ仕様にもインクリ仕様にも変更可能です。バッテリーバックアップ期間は1年間ですが、万が一、アブソバッテリが完全に消耗しても、インクリ仕様として動作させることが可能なため、ラインを停止させることがなく安心です。 ...
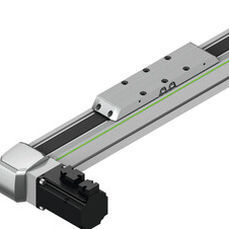
ストローク: 5,500, 3,000 mm
速度: 5, 3 m/s
推進力: 4,000, 1,240, 880, 300 N
... リニア軸と軸システムは、部品の搬送や位置決めのために多くの産業分野で使用されています。HIWIN は、高い動力学と速度を必要とする用途向けに、歯付ベルト駆動のリニア軸を提供しています。HIWINのモジュラーシステムにより、ベルト軸は要件に応じて2軸や多軸システムに柔軟に組み合わせることができます。高い送り力と精度が要求される用途には、ボールネジ付き HIWIN リニア軸をご利用いただけます。リニアモーター駆動のHIWINリニア軸は、動力学、精度、同期性の点で最高の要件を満たします。 歯付ベルト駆動のHIWINリニア軸は、高い移動速度と長い移動距離を実現します。ミリ単位で自由に選択可能なストロークと幅広いオプション(スチールカバーストリップ、リミットスイッチ、距離測定システム、様々なサイズの追加スライドなど)により、軸はそれぞれのアプリケーション要件に個別に適合させることができます。 歯付ベルト駆動のリニア軸は、コンパクトでフレキシブルな位置決めモジュールです。特に、高い動的応答性と速度を必要とするアプリケーションに最適です。さらに、リニア軸 ...
HIWIN GmbH

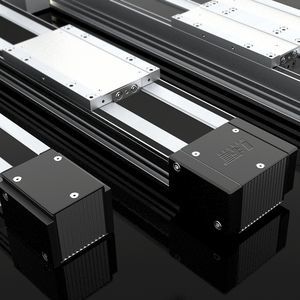
ストローク: 5,500 mm
速度: 5 m/s
推進力: 813, 3,000, 1,300, 4,500 N
... リニア軸と軸システムは、部品の搬送や位置決めのために多くの産業分野で使用されています。HIWIN は、高い動力学と速度を必要とする用途向けに、歯付ベルト駆動のリニア軸を提供しています。HIWINのモジュラーシステムにより、ベルト軸は要件に応じて2軸や多軸システムに柔軟に組み合わせることができます。高い送り力と精度が要求される用途には、ボールネジ付き HIWIN リニア軸をご利用いただけます。リニアモーター駆動のHIWINリニア軸は、動力学、精度、同期性の点で最高の要件を満たします。 歯付ベルト駆動のHIWINリニア軸は、高い移動速度と長い移動距離を実現します。ミリ単位で自由に選択可能なストロークと幅広いオプション(スチールカバーストリップ、リミットスイッチ、距離測定システム、様々なサイズの追加スライドなど)により、軸はそれぞれのアプリケーション要件に個別に適合させることができます。 歯付ベルト駆動のリニアテーブルは、ダブルガイドを内蔵したフレキシブルな位置決めモジュールです。特に高い動的応答性と高速性が要求される用途に最適です。また、HT-Bリニアテーブルは、大きな移動距離を実現することができます。 ...
HIWIN GmbH

ストローク: 300, 1,200 mm
速度: 3, 5 m/s
... リニア軸と軸システムは、部品の搬送や位置決めのために多くの産業分野で使用されています。HIWIN は、高い動力学と速度を必要とする用途向けに、歯付ベルト駆動のリニア軸を提供しています。HIWINのモジュラーシステムにより、ベルト軸は要件に応じて2軸や多軸システムに柔軟に組み合わせることができます。高い送り力と精度が要求される用途には、ボールネジ付き HIWIN リニア軸をご利用いただけます。リニアモーター駆動のHIWINリニア軸は、動力学、精度、同期性の点で最高の要件を満たします。 歯付ベルト駆動のHIWINリニア軸は、高い移動速度と長い移動距離を実現します。ミリ単位で自由に選択可能なストロークと幅広いオプション(スチールカバーストリップ、リミットスイッチ、距離測定システム、様々なサイズの追加スライドなど)により、軸はそれぞれのアプリケーション要件に個別に適合させることができます。 歯付ベルト駆動のカンチレバー軸は、ドライブブロックが静止し、軽量カンチレバーが移動する汎用性の高いリニアユニットです。特に、高ダイナミズムと高速度が要求される垂直用途に最適です。 ...
HIWIN GmbH
ストローク: 0 mm - 5,500 mm
速度: 0 m/s - 2.5 m/s
... IEFリニアモジュールのベーシッククラスは、多くのアプリケーションでコスト効率の高い位置決めを可能にします。数千倍の実績があり、堅牢でメンテナンスが容易なリニアモジュールは、速度やサイクルタイムが要求されないピック&プレースアプリケーションに最適です。全高が低く、全体寸法が小さいため、省スペース設計が可能です。 誘導式リミットスイッチを内蔵し、配線の手間を省きます。 特殊な状況に対応する可変モーターアタッチメント トーシングとシャフト接続は一体型 - 全寿命にわたってバックラッシュゼロを保証 すべてのシャフトとハブの接続は、フォースロック接続エレメントで設計されています。 包括的なアセンブリ材料により、コスト効率の高い組み合わせが可能 IEFリニアユニットのプレミアムクラスは、コンパクトな構造と高性能データを兼ね備えています。これらのリニアユニットは、最新の組立ラインや生産ラインのスピードと精度に対する高い要求を満たしています。 特徴 ...

ストローク: 100 mm - 5,780 mm
速度: 5 m/s - 10 m/s
推進力: 100 N - 9,400 N
... 注文方法 - より長い移動距離をご希望の場合 バージョン - ガイド 歯付ベルト付きRKモノラインの追加/二次サポートとして最適 ...
RK Rose+Krieger GmbH

ストローク: 5,614, 5,384 mm
速度: 5 m/s
推進力: 4,367, 1,500 N
... RKモノラインMT-オメガドライブ付きリニアユニット RKモノライン製品ラインの新しいメンバーは、RK MonoLine Z 80のローラガイドコンセプトに基づいていますが、RK Monline MTでは、タイミングベルトは循環しませんが、ガイドキャリッジの領域で駆動されます。 だからこそ、オメガドライブと呼ばれています。 実証済みの可変マウントコンセプトにより、市場で入手可能なほぼすべてのモータに対してモータ位置を変更することができます。 コンパクトな寸法は、高速、高い位置決め精度と再現性を促進します。特に、トラベリングベースプロファイルおよび固定キャリッジ/モーターを備えた多軸システムで垂直軸として使用します。 ...
RK Rose+Krieger GmbH

ストローク: 3,722 mm - 17,476 mm
速度: 5 m/s - 10 m/s
推進力: 480 N - 6,000 N
... 特徴 最大18 mのストローク 最大移動速度5 m/s BLOCAN® モジュラープロファイルシステムによるガイドプロファイル 固定スロット付き押し出しキャリッジ ガイドブロックとドライブはキャリッジと共に移動 オプション 長いストローク長 セカンドキャリッジ(非駆動または個別駆動 拡張キャリッジ ...
RK Rose+Krieger GmbH

ストローク: 1,000 mm - 5,800 mm
速度: 0 m/s - 5 m/s
推進力: 1,015 N - 13,725 N
... リニアユニット ベルトドライブ式リニアユニット アプリケーションの特性に合わせて 使用されているベルトは、スチール製のストランドを持つポリウレタン製で、歯にはコーティングが施されており、高速回転時のノイズを低減しています。 ベルトはプロファイルに作られたガイドスロット内をスライドし、内部機構を埃や加工残渣から保護します。 また、トロリー内部にスチールシートを入れることで、ユニットの保護を強化しています。(高保護バージョン). ベルトのメンテナンス作業が容易に行えます。 ベルトの交換や張力調整は、ユニットをアプリケーションから取り外すことなく行うことができます。 モーター軸をシュリンクディスクや円錐形のブッシュで固定したり、突出した軸とカップリングジョイントで固定することで、動きを直接伝えることができます。 高効率・高精度の遊星ギアボックスを用意しており、移動する負荷に応じてモーターの性能を最適化することができます。 豊富なアクセサリーにより、単軸または多軸のソリューションを構築することができます。 高性能ギアボックス、サーボステッピングモーター、ブラシレスモーター、各種リターンシャフト、適切なインターフェースプレートなど、幅広い選択肢をご用意しています。 さらに、定期的な潤滑のためのアクセス性も良好です。 リターンヘッドにはテンショニングシステムを搭載。 トロリーから荷物を取り外すことなく調整が可能です。 直交型の構成 ドライブヘッドには、シュリンクディスクや円錐形のブシュを入れる穴のあるゼロプレイプーリーが装備されています。 ...

... • 歯付きベルト付きカーボンファイバー軸 • Pick & Placeアプリケーションでの 要求 • 高速で正確な位置決め(ポイントツーポイント) • 高いダイナミクスと位置決め精度 実装 • カーボンファイバー軸(低移動質量)による高いダイナミクスと固有の剛性 • 本質的に剛性ベース軸 • リニア磁気測定システムによる高精度・再現性 システム全体: • 負荷:20 kg • 分解能測定システム:1 μm • 再現性:2 μm • 絶対精度:±20 µm • 繰り返し高さ/側:±100 µm/±150 ...
JAT - Jenaer Antriebstechnik GmbH

ストローク: 0 mm - 100 mm
速度: 1.5 m/s
推進力: 500 N
... 高精度ガイド用プロファイルガイドレール 1台または2台のキャリッジを装着可能 アルミニウム製プロファイル、固定用スロット付き フルカバー ローメンテナンス 誘導リファレンスとエンドスイッチの接続が可能 オプション:アダプタープレート、スロットナット、シャフトドライブ、モーターフランジの組み合わせ、スイッチ 技術データ 最大摩擦トルク(1キャリッジ使用時) - 3 Ncm 最大駆動トルク - 4 Nm 最大モーターシャフト Ø - 14 mm 許容曲げトルク - 1 キャリッジ - ダブルキャリッジ Mx ...
JBO

... このユニットは、2つの統合されたローラーガイドを備えた長方形のアルミニウムプロファイルで構成されています。 キャリッジはベルトドライブによって移動されます。 駆動側では、プーリーは遊星歯車のシャフトに引っ張られています。 ベルトの張力は、ドライブの反対側で簡単なネジ調整によって再調整できます。 特殊な湾曲したアルミニウムシートがキャリッジ側を覆っています。 キャリッジとアルミニウムシートの間には小さな隙間しかありません。 その特別な設計のため、プーリ領域の上にキャリッジを駆動することが可能です。 ...

ストローク: 1 mm - 3,860 mm
速度: 0 m/s - 1 m/s
推進力: 25, 50 N
... 軽量、静音、高性能!リニアユニットGSF 8 40 R10は、最小限のスペースで効率的なターンキーシステムを実現します。この経済的なリニアユニットは、わずかな部品で最大の性能を発揮します。例えば、スライドはサポートプロファイルのライン8の溝をガイドとして使用します。また、耐摩耗性のスライディングシューを採用し、潤滑剤なしで走行します。 ドライブユニットとリバースユニットは非常にコンパクトな設計です。タイミングベルトのテンション装置はリバースユニットに組み込まれています。ボールベアリング搭載のプーリーにより、長期間の使用でも静かでスムーズな走行が可能です。タイミングベルトは、プロファイルの溝を通って戻されます。 コンパクトな寸法とメンテナンスフリーの設計により、リニアユニットGSF ...
item industrial applications