
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

アンペア数: 5 A - 200 A
出力: 16, 32, 64 kW
... 製品概要
PacHPはInfranorのサーボドライブで、産業用のモーションコントロール用途に設計されています。さまざまな荷重や機構に対してループ調整を自動で行い、安定した動作を提供します。統合されたオートチューニングとオートフェージングにより、迅速な立ち上げと高精度な運動制御が可能です。
主な利点
- 16年以上の現場実績に裏付けられた信頼性。
- オートチューニングとオートフェージングにより追従誤差を低減し、立ち上がり時間を短縮、機械的振動を抑制。
- Optio

アンペア数: 1.2, 2.8, 3.5 A
出力: 200, 400, 600 W
... サーボモータとは、サーボシステムの機械要素の動作を駆動する電気モータのこと。 サーボモータは、サーボシステムにおける機械要素の動作を駆動する電気モータのことで、精密運動制御における機械的エネルギー変換と信号変換のための制御可能な機械的電磁装置である。 精密運動制御。 サーボドライバは、制御信号の下で実行モータを駆動するので、ドライバが正常に動作するかどうかは、装置全体の性能に直接影響します。サーボ制御システムにおいて、サーボドライバは脳に相当し、実行モータは手足に相当する。サーボ制御システムにおけるサーボドライバの役割は、モータの回転速度を調整することであり、自動速度制御システムでもある。 サーボモータを回転させるためには、それに対応したドライバを搭載する必要があるが、これはサーボモータの構造によって決まる。サーボモータは電子変換を行うため、駆動ドライブ回路を使用する必要がある。サーボモータの逆転回路は、駆動と制御の2つの部分から構成されている。 ...

アンペア数: 1.2 A - 4.1 A
出力: 0.2, 0.4, 0.6 kW
... サーボモーターはエグゼクティブモーターとも呼ばれる。自動制御システムでは、受信した電気信号を角変位や角速度出力に変換する実行要素として使用されます。 自動制御システムでは、受信した電気信号を角変位または角速度出力に変換する実行エレメントとして使用されます。 に変換します。 ACサーボドライバは、ACサーボモータを制御し、電力を供給するために使用される電子機器である。通常、コントローラまたはコンピュータシステムからコマンドを受信し、モータの速度、位置、トルクを制御するために使用できる信号に変換します。 ACサーボ・ドライバは、モータの巻線に必要な電圧と電流を供給することで動作し、回転磁界を発生させて運動を生み出します。また、エンコーダやレゾルバ信号など、モータからのフィードバック信号を監視し、モータの性能を調整することで、精密で正確な動きを実現します。 サーボモーターの主な構成部品は以下の3つである: モーター:モータ:モータはサーボシステムの中核部品である。電気エネルギーを機械エネルギーに変換する役割を担う。サーボモーターにはDCモーターとACモーターがある。 ギアトレイン:ギアトレインは、モーターと出力軸をつなぐ歯車の機械システムです。トルクを増加させ、出力シャフトの速度を減少させるために使用されます。ギアトレインは1つまたは複数のギアで構成され、平歯車、遊星歯車、ウォームギアなどさまざまなタイプがあります。 ...

アンペア数: 5 A
消費電力: 272 W
... IMPACT™アーキテクチャ搭載のFlexPro® pcb実装サーボドライブFE060-5-EMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブはEtherCAT®通信を利用し、USBインターフェイスを介して起動します。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - シーケンス プライマリーフィードバック - ...
ADVANCED Motion Controls

アンペア数: 5 A
消費電力: 272 W
... IMPACT™アーキテクチャを搭載したマイクロサイズのFXM060-5-EM FlexPro®拡張環境サーボドライブは、EtherCAT®通信を使用した集中型または分散型制御システム用の汎用デジタルサーボドライブです。コンパクトなサイズであるため、スペースが制限されるアプリケーションに最適です。このドライブはFXE060-5-EMの代替バージョンで、直接プラグインする代わりに便利なコネクタを備えているため、どのようなシステムにも簡単に組み込むことができます。 制御/コマンド - ±10 Vアナログ - ...
ADVANCED Motion Controls

アンペア数: 1 A
消費電力: 54 W
... IMPACT™アーキテクチャ搭載のFlexPro® PCB実装サーボドライブFE060-1-CMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブは、CANopen通信を利用し、USBインターフェイスを介して起動します。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - シーケンス プライマリーフィードバック - BiSS ...
ADVANCED Motion Controls
アンペア数: 1 A
消費電力: 54 W
... IMPACT™アーキテクチャを搭載したマイクロサイズのFM060-1-CM FlexPro®ドライブは、CANopen通信を使用した集中型または分散型制御システム用の汎用デジタルサーボドライブです。コンパクトなサイズのため、スペースが制限されるあらゆるアプリケーションに最適です。このドライブはFE060-1-CMの代替バージョンで、直接プラグインする代わりに便利なコネクタを使用するため、どのようなシステムにも簡単に組み込むことができます。 制御/コマンド - ±10 Vアナログ - ステップ & ...
ADVANCED Motion Controls

アンペア数: 5 A
消費電力: 272 W
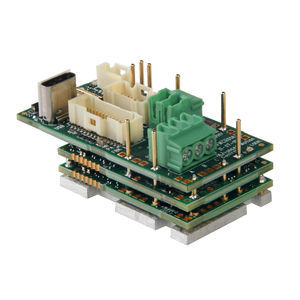
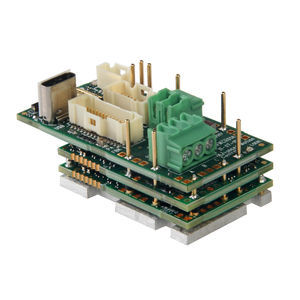
... FD060-5-CMは、IMPACT™アーキテクチャを搭載したFE060-5-CM FlexPro®サーボドライブ用のサーボドライブおよび開発ボードアセンブリです。コントローラ、モータ、電源、およびフィードバックへの接続は、ボード上の標準コネクタによって簡素化されています。FD060-5-CMはプロトタイピングに最適で、生産および産業環境でも使用できます。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - ...
ADVANCED Motion Controls
アンペア数: 1 A
消費電力: 54 W
... IMPACT™アーキテクチャを搭載したマイクロサイズのFM060-1-RM FlexPro®ドライブは、RS485/232通信を備えた集中型または分散型制御システム用の汎用デジタルサーボドライブです。コンパクトなサイズのため、スペースが制限されるあらゆるアプリケーションに最適です。このドライブはFE060-1-RMの代替バージョンで、直接プラグインする代わりに便利なコネクタを使用するため、どのようなシステムにも簡単に組み込むことができます。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - ...
ADVANCED Motion Controls
アンペア数: 10 A
消費電力: 545 W
... IMPACT™アーキテクチャ搭載のFlexPro® PCB実装サーボドライブFE060-10-CMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブは、CANopen通信を利用し、USBインターフェイスを介して起動します。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - シーケンス プライマリーフィードバック - ...
ADVANCED Motion Controls

アンペア数: 10 A
消費電力: 545 W
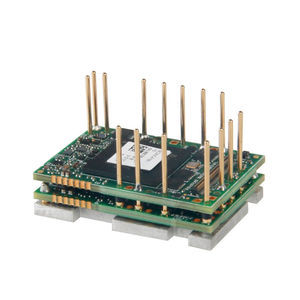
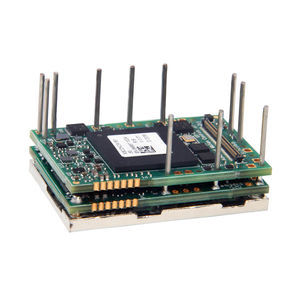
... FD060-10-CMは、IMPACT™アーキテクチャ搭載FE060-10-CM FlexPro®サーボドライブ用のサーボドライブおよび開発ボードアセンブリです。コントローラ、モータ、電源、フィードバックへの接続は、ボード上の標準コネクタを使用して簡素化されています。FD060-10-CMはプロトタイピングに最適で、生産および産業環境でも使用できます。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - ...
ADVANCED Motion Controls
アンペア数: 5 A
消費電力: 272 W
... IMPACT™アーキテクチャ搭載のFlexPro®拡張環境サーボドライブFXE060-5-CMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブは、CANopen通信を利用し、USBインターフェイスを介して起動します。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - シーケンス プライマリーフィードバック - BiSS ...
ADVANCED Motion Controls
アンペア数: 1 A
消費電力: 54 W
... IMPACT™アーキテクチャ搭載のFlexPro® pcb実装サーボドライブFE060-1-EMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブはEtherCAT®通信を利用し、USBインターフェイスを介して起動します。 制御/コマンド - ±10 Vアナログ - ステップ&方向(5V) - エンコーダ追従 - インデックス - ジョギング - ネットワーク経由 - シーケンス プライマリーフィードバック - ...
ADVANCED Motion Controls